New student team constructs robotic submarine, finishes 4th at international competition
A new competitive student team founded at the beginning of the 2020-21 academic year took home 4th-place finishes in two categories at RoboNation’s international RoboSub competition. Michigan Robosub built their first autonomous submarine and competed virtually against 54 teams from 12 countries, completing several aquatic tasks that relied on the team’s mechanical, software, and electrical design skills.
RoboSub is an international student competition for teams to design and build robotic submarines, or “Autonomous Underwater Vehicles” (AUV), with behaviors that mimic real-world systems deployed around the world, such as underwater exploration, seafloor mapping, and sonar localization. The challenges the students undertake can include oceanographic exploration and mapping, detection and manipulation of objects, and pipeline identification and tracking.
For this year’s virtual competition, the teams submitted a set of skills videos to demonstrate their sub’s ability to handle each task category, as well as a technical design report, a team website with design progress and documentation, and a demonstration video of vehicle behaviors. Michigan Robosub, with 26 students from a number of departments and schools, placed 4th in the sensor optimization and website categories and 10th in hull design.
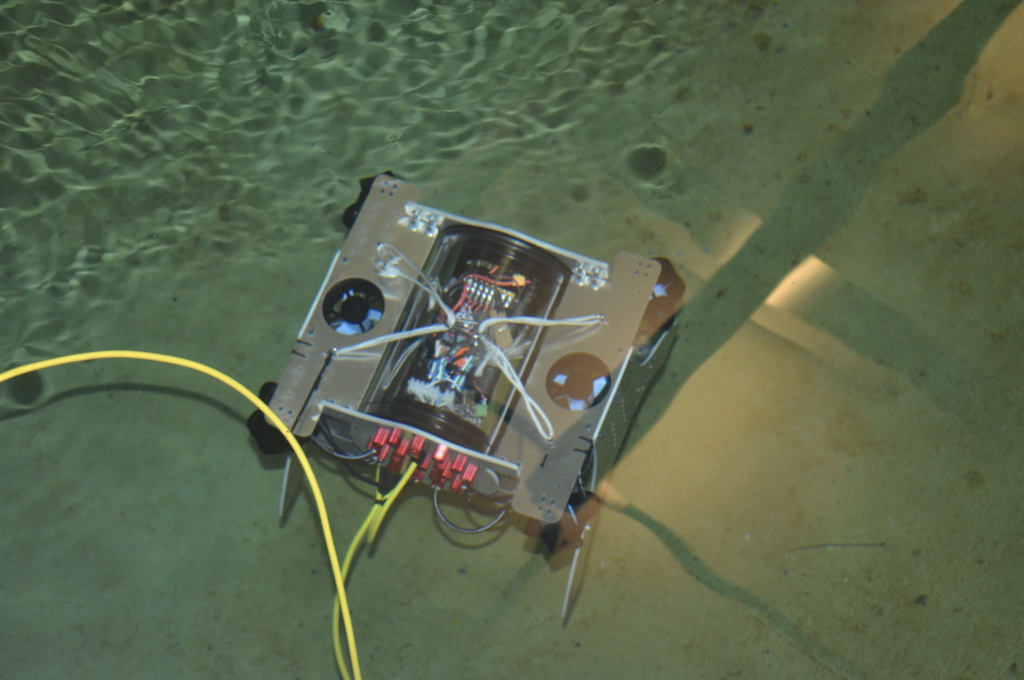
“Our team is only one year old and this was our first competition,” says Med Frezghi, the team’s media director. Their first sub, called Huron, was designed to be modular, allowing for the addition of more complex systems in future years. It detects objects within visual distance using computer vision models, which locate tasks to execute.
This year’s RoboSub competition had five main tasks: submerging and maneuvering the vehicle through a gate, touching target buoys moored underwater, dropping objects into bins, firing torpedoes through different sized openings, and surfacing within a designated area after picking up an item. The vehicle had to autonomously move from task to task guided by acoustic pingers or visual detection of goal objects.
To achieve this, students split into a mechanical and software/electrical team. The software team began their work remotely before in-person testing ahead of the competition. They’re led by CS major Katie Wakevainen, and were led during the previous school year by CE major and current team president Alex Steinig.
“As a first year team, the software team had to design a system from scratch to handle autonomous navigation,” says Wakevainen. “I’m very proud of our team for our strong results especially given that the majority of our software development was done remotely.”
They centered the sub’s software design around a node system, with a main Robot Operating System-based architecture supported by software nodes for each competition task and additional nodes for general tasks like maintaining depth or centering the sub’s trajectory on an object.

The sub used two computers, a Raspberry Pi for calculations, navigation logic, and communication with the motor controller, and an Nvidia Jetson Nano (with embedded GPU) for image processing and computer vision. The sub navigated with information from a stereo camera, which provided depth data, and target detection was achieved with trained machine learning models. The team’s sensor optimization video highlighted the image processing work used in visual location tasks. The model can currently identify the gate the sub had to navigate through, and will be expanded to include several other tasks for next year’s competition in San Diego.
The mechanical team, led by Mechanical Engineering majors Thomas Brunner and Kobi Wettstein, focused the year’s efforts on ease of manufacturing and assembly, since COVID restrictions limited in-person testing time. The team built a frame consisting of several thin, anodized aluminum plates that were each machined on a waterjet. They also 3D printed an electronics chassis and designed a torpedo launcher system and gripper mechanism used for picking up target objects.
Both team’s design philosophy was focused on creating a vehicle that was simple and adaptive. For the mechanical team, this included buying certain pre-made parts and manufacturing the simpler ones in-house.
“Our main goal this year was more about learning the basics rather than performing at a very high level,” says Brunner. “Despite that, with the help of everyone on the team we pulled off an impressive ranking in the competition. Spirits are high as we work on our design for next year”
After a successful first competition, the team is eager to recruit members and Implement new design ideas, including a more complex and accessible wateright electronics enclosure, and fully manufactured torpedo launcher and gripper systems for the next competition cycle.